یک کنترل کننده دما چیست؟
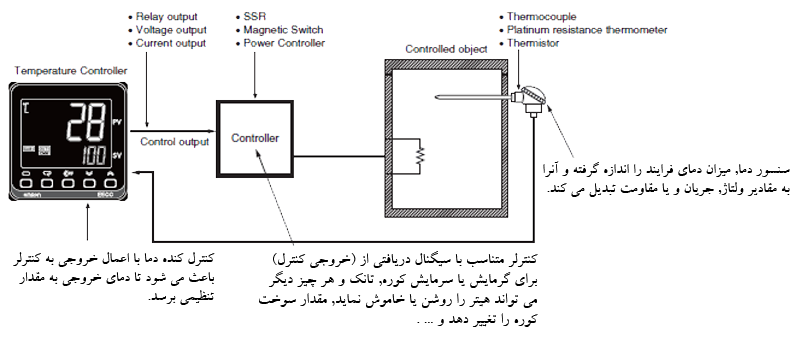
یک کنترلر دما, دستگاهی است که برای کنترل هیتر یا دستگاههای گرم کننده بکار می رود. این دستگاهها خروجی سنسور دما را با مقدار تنظیمی مقایسه کرده و با انجام محاسباتی متناسب با میزان انحراف آنها از همدیگر, دما را کنترل می کند. تجهیزاتی که که با سنسورهایی غیر از دما نظیر سنسورهای فشار, رطوبت, فلو و … کار می کنند, کنترلر نامیده می شودن. کنترلرهای الکترونیکی را بطور خاص کنترل کننده دیجیتال می نامند.
کنترل دما
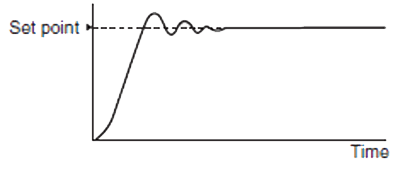
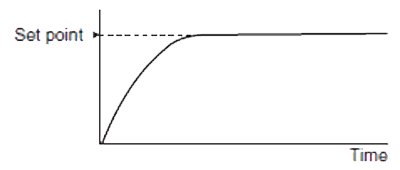
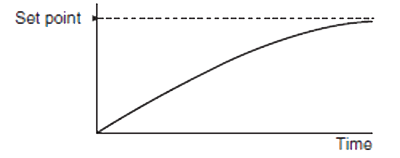
کنترل کننده های دما, دما را چنان کنترل می کنند که مقدار پروسس معادل مقدار تنظیمی شود اما نتایج اغلب به علت ویژگیهای شی کنترل شده و همچنین به علت نحوه کنترل آن متفاوت خواهد بود. بعنوان نمونه به شکل ۲ توجه کنید که در آن مقدار فرایند سریعا به نقطه تنظیم بدون جهش رسیده است, نیازمند یک کنترل کننده دما است. به شکل ۱ نیز دقت کنید که در آن مقدار دما خیلی سریع افزایش یافته ولی باعث جهش در مقدار دما شده است و یا در شکل ۳ که دما با بطور آهسته افزایش می یابد.
۱- پاسخی که مقدار فرایند به مقدار تنظیمی خیلی سریع می رسد ولی دارای نوسانات دما می باشد.
۲- پاسخ مناسب
۳- پاسخ کند که در آن مقدار فرایند دیر به مقدار تنظیم شده می رسد.
مثالی برای ترکیب کنترل دما
مثال زیر, ترکیب ساده کنترل دما را نشان می دهد.
اصول کنترل دما
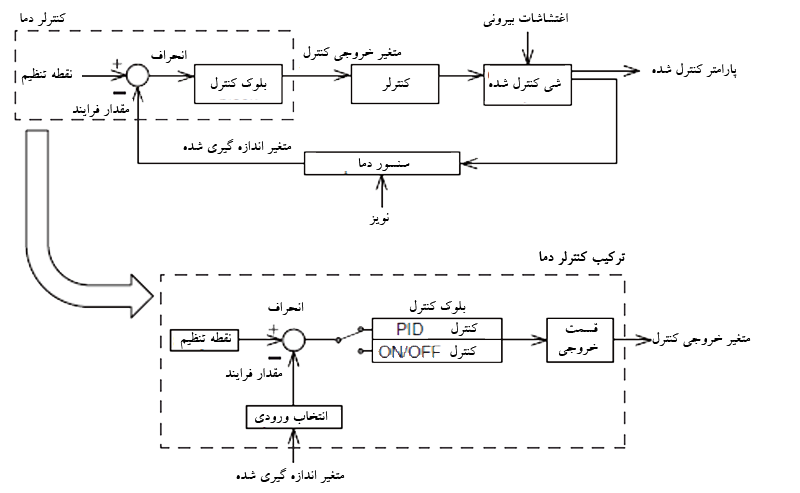
شکل زیر, نمونه از یک سیستم کنترل فیدبک برای کنترل دما را نشان میدهد. بخشهای اصلی سیستم کنترل فیدبک داخل یک کنترل کننده دما طراحی و ساخته می شود. یک سیستم کنترل فیدبک را می توان ساخت و دما را می توان با ترکیب یک کنترلر و سنسوری که مناسب موضوع کنترل شونده باشد, کنترل نمود.
ترکیب یک سیستم کنترل فیدبک
مشخصات شی کنترل شونده:
قبل از انتخاب یک کنترل کننده دما و سنسور دما, لازم است ویژگیهای حرارتی شی کنترل شونده را برای کنترل دمای مناسب بدانیم.
ویژگیهای شی کنترل شونده:
– ظرفیت حرارتی: نشاندهنده میزان سهولت در گرمایش است که با مقدار ظرفیت کوره تغییر می یابد.
– ویژگیهای استاتیک: نشاندهنده ظرفیت گرمایش است که با مقدار ظرفیت هیتر تغییر می یابد.
– ویژگیهای دینامیک: نشاندهند مشخصات شروع گرمایش است که با مقدار هیتر و ظرفیت کوره که به همدیگر اثر می گذارند.
– اغتشاشات بیرونی: باعث تغییرات دمایی در سیستم می شوند. برای مثال باز و بستن در یک مخزن با دمای ثابت, باعت تغییراتی در میزان دمای آن خواهد شد.
روشهای کنترل
کنترل ON/OFF
همانطوریکه در شکل زیر نشان داده شده است, چنانچه مقدار پروسس کمتر از مقدار تنظیمی باشد, خروجی کنترلر روشن شده و هیتر شروع به گرمایش می کند. اگر مقدار فرایند بیشتر از مقدار تنظیمی باشد, خروجی خاموش شده و هیتر نیز خاموش خواهد شد. این روش کنترل که در آن خروجی بر اساس نقطه تنظیم برا ثابت نگهداشتن دما, روشن و خاموش می شود, روش ON/OFF نامیده می شود. با این روش, دما با استفاده از دو مقدار (۰% و ۱۰۰% نقطه تنظیم( کنترل می شود از اینرو به این فرایند, روش کنترل با دو موقعیت می گویند.

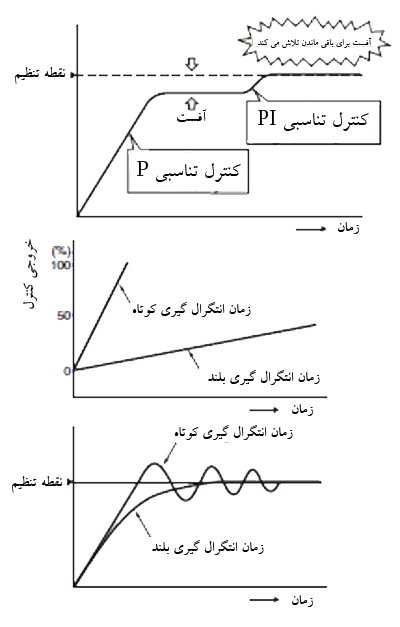
کنترل P (تناسبی)
کنترل تناسبی برای بدست آوردن متغیر خروجی کنترل که متناسب با میزان انحراف مقدار فرایند از مقدار تنظیمی است, بکار گرفته می شود.
یک باند تناسبی, با مرکزیت مقدار تنظیمی, انتخاب شده و خروجی با استفاده از قوانین زیر مشخص می شود.
– هنگامی که مقدار فرایند داخل باند تناسبی قرار دارد, متغیر خروجی کنترل که متناسب با میزان انحراف است, بدست می آید.
– زمانی که مقدار فرایند کمتر از باند تناسبی باشد, متغیر خروجی کنترل به میزان ۱۰۰% آن, اعمال می شود.
– هنگامی که مقدار فرایند بیشتر از باند تناسبی باشد, متغیر خروجی کنترل به میزان ۰% آن, اعمال می شود.
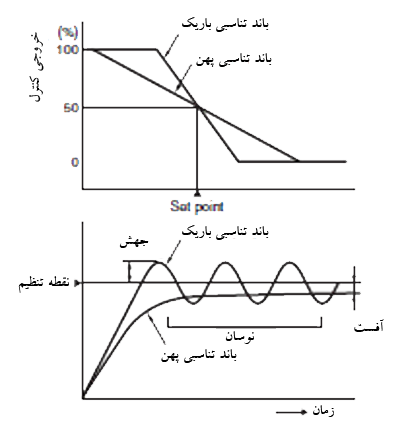
در این روش کنترل روان تری نسبت به کنترل ON/OFF خواهیم داشت, چرا که مقدار خروجی به تدریج و متناسب با میزان انحراف آن با مقدار تنظیمی تغییر می یابد. با این وجود, اگر دما با روش کنترل تناسبی, کنترل شود, باعث می شود که همواره یک اختلافی (آفست) با مقدار تنظیمی داشته باشیم.
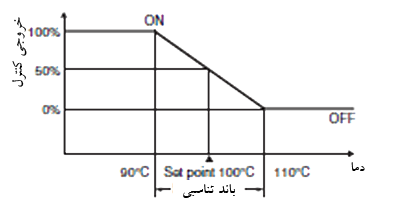
توجه: اگر یک کنترلر دما با رنج دمایی ۰ تا ۴۰۰ درجه, ۵% باند تناسبی داشته باشد (۲۰درجه باند تناسبی( در این حالت اگر مقدار تنظیمی, ۱۰۰ درجه باشد, تا زمانی که دما زیر ۹۰ درجه باشد, میزان خروجی گرمایش ۱۰۰% خواهد بود. بعد از آن با افزایش دما از ۹۰درجه, مقدار خروجی بین ۱۰۰% و ۰% تغییر می یابد و هیچ اختلاف زمانی مابین زمان روشن و خاموش شدن وجود نخواهد داشت(.
عمل انتگرال گیری I: روش کنترل انتگرال گیر
با روشن انتگرال گیری, میزان خروجی کنترل متناسب با میزان و مدت انحراف دمای فرایند با مقدار تنظیمی, افزایش یا کاهش می یابد. دما در مقداری کمتر از مقدار تنظیمی (آفست( با استفاده از عمل تناسبی ثابت نگهداشته می شود, اما میزان انحراف با گذر زمان کاهش خواهد یافت و با استفاده از ترکیب عمل انتگرال گیری و تناسبی, مقدار فرایند برابر با مقدار تنظیمی خواهد شد.
عمل مشتق گیری D
عمل مشتق گیری برای غلبه بر تغییرات ایجاد شود در مقدار فرایند توسط عواملی نظیر اغتشاشات بیرونی بکار گرفته می شود طوری که کنترل سریعا به وضعیت اصلی خود برگردد. عمل تناسبی و انتگرال گیری هردو, نتایج خروجی کنترل را اصلاح می کنند, بنابراین پاسخ به تغییرات ناگهانی به تاخیر می افتد. عمل مشتق گیری, این موضوع را جبران می کند و باعث ایجاد خروجی کنترل بزرگتری برای اغتشاشات بیرونی سریع می گردد.

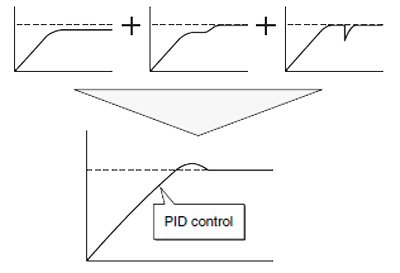
کنترل PID
کنترل PID ترکیبی از کنترلهای تناسبی, انتگرال گیری و مشتق گیری است. در این روش,با استفاده از عمل تناسبی, روان انجام می شود, تنظیم آفست اتوماتیک با استفاده از عمل انتگرال گیری انجام شده و پاسخهای سریع به اغتشاشات بیرونی با عمل مشتق گیری, جواب داده می شود.
کنترل PID دوبل
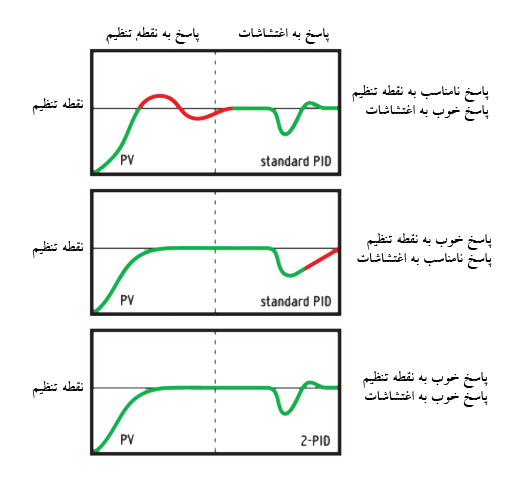
کنترل PID مرسوم, از یک بلوک کنترلی برای کنترل دما و پاسخ به اغتشاشات بیرونی استفاده می کند. اگر به نحوه پاسخ به اغتشاشات بیرونی اهمیت بیشتری بدهیم باید پارامترهای P و I را کوچک انتخاب کرده و مقدار D را افزایش دهیم. دراینصورت پاسخ به نقطه تنظیمی متناسب با میزان اورشوت (جهش) نوسان خواهد نمود. از سوی دیگر, اگر به مقدار تنظیمی توجه بیشتری شود (بعبارت دیگر مقادیر P و I بزرگتر انتخاب شود( کنترل کننده دما قادر به پاسخ سریع به اغتشاشات بیرونی نخواهد بود.بنابراین رسیدن به نقطه تنظیم در سریعترین زمان و پاسخ سریع به اغتشاشات بیرونی غیر ممکن خواهد بود.
روش کنترل PID دوبل, این موضوع را حل می کند.
کنترل PID
(۱)
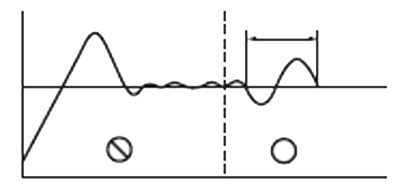
اگر پاسخ به اغتشاشات بیرونی بهبود یابد, پاسخ به نقطه تنظیمی آهسته خواهد بود.
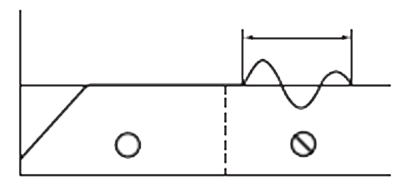
اگر پاسخ به نقطه تنظیمی بهبود یابد, پاسخ به اغتشاشات بیرونی, آهسته خواهد بود.
(۳) کنترل PID دوبل
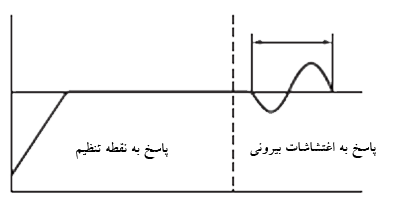
پاسخ به نقطه تنظیم و اعتشاشات بیرونی, هردو را کنترل می کند.